Bio-inspired Space Gripper
Frequently, robots need to grab external objects, either to manipulate them or anchor onto them. However, conventional designs of controllable grippers, such as suction or electromagnetism, face unique challenges in the space environment. In fall 2023, I had an opportunity to explore an alternative solution of gecko-like directional dry adhesives.
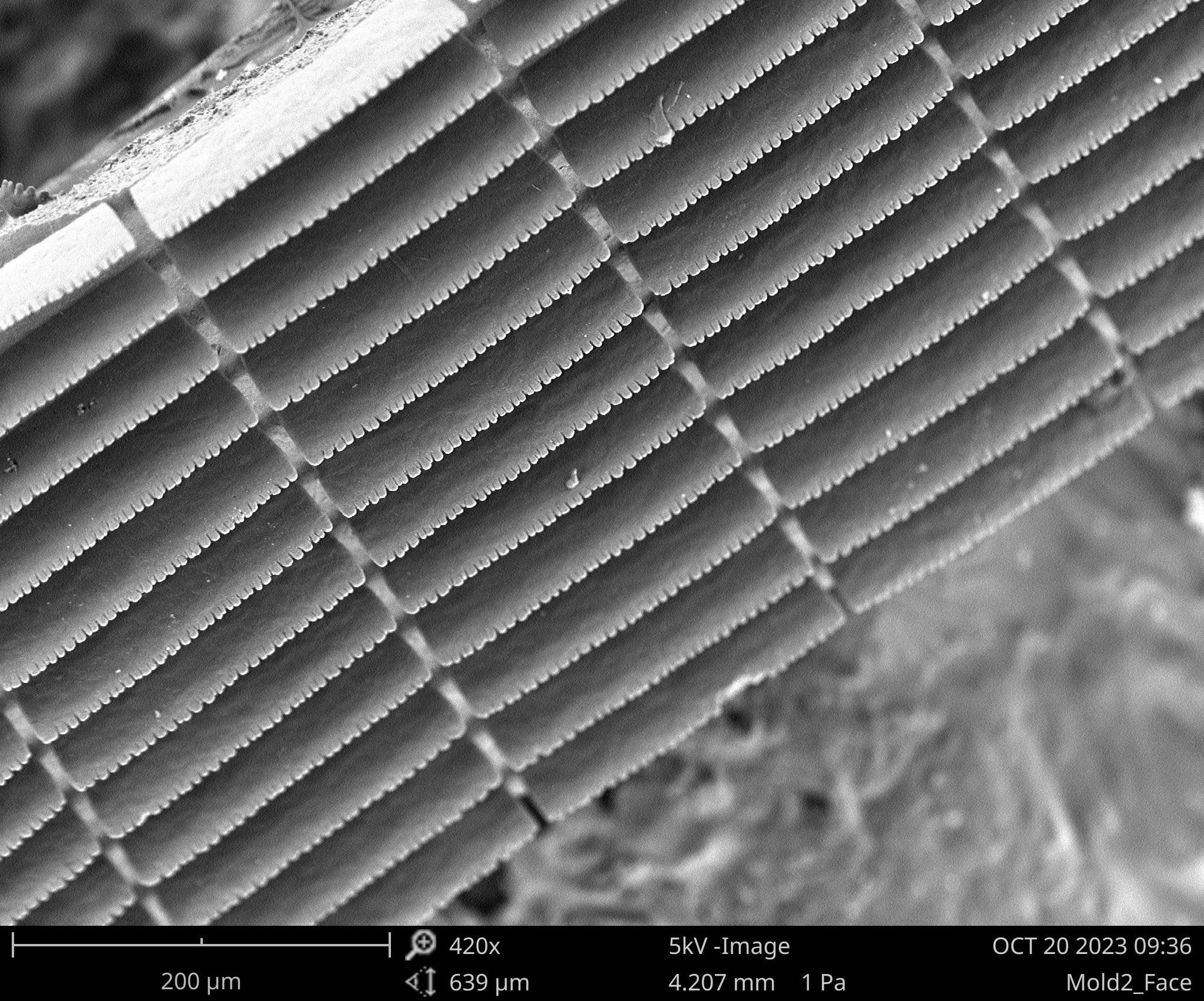
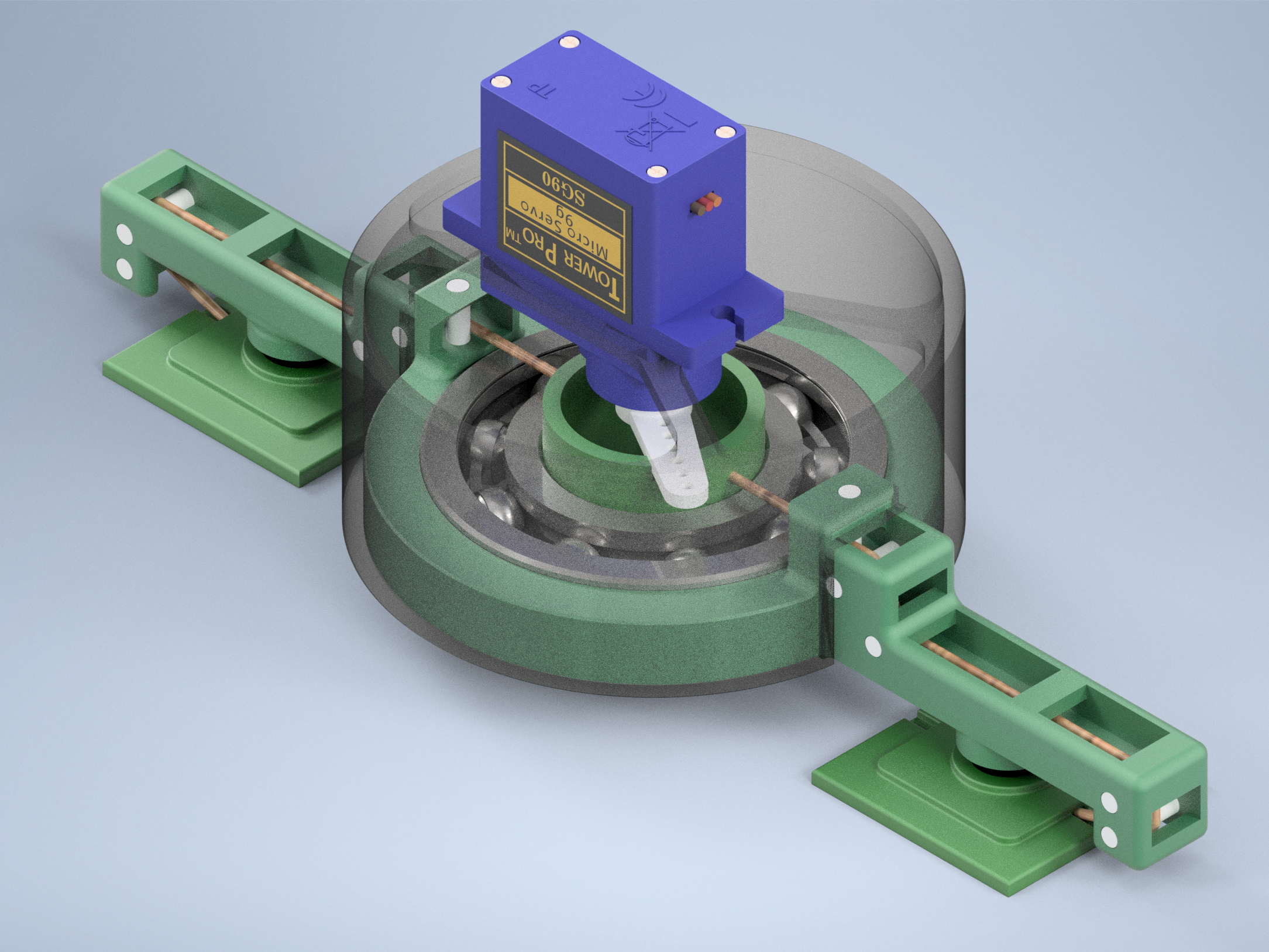
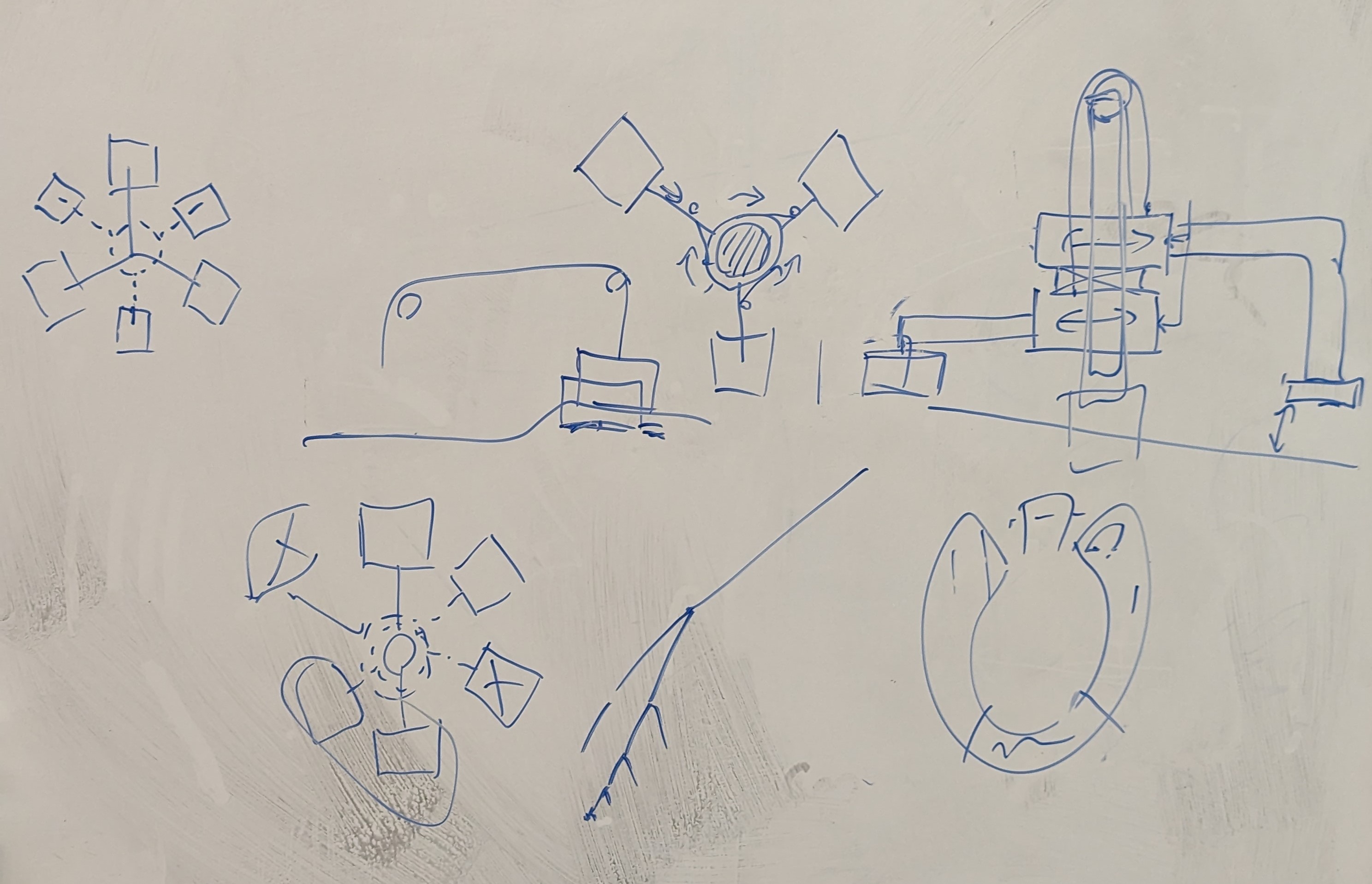
My first task was manufacturing the gecko-like adhesive using old molds we had and inspecting them using a SEM, shown in figure above. After that, I am tasked to prototype a new gripper that apply shear force using horizontal rotation instead of vertical. This would help us in the future when we want to scale up the gripper and use more than one pair of adhesive pads.